CandyBot
An installation to make automated Cotton Candy of different shapes and sizes. In this project my role was less conceptual and leaning more towards executing and building the different systems of the cottan candy machine.

Candy Shapes
Other than the hardware-software integration, I was responsible in controlling the robotic arm to make cotton candy. We used the encoders on the arm to record the motions of making shapes and then replay it with the other systems in sync in to make cotton candy with different shapes. Node-red was used to integrate different sensor/actuator systems.

Robot Arm
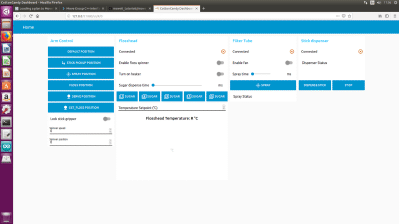
Node-Red
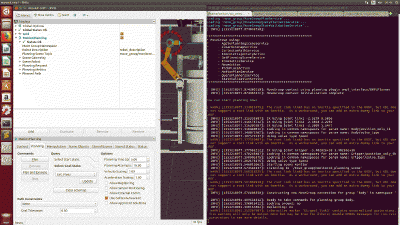
ROS+MoveIt
I cannot disclose all the details of this project, but there were some fun things we tried with the robotic arm.